Home > Press > Surprisingly simple scheme for self-assembling robots: Small cubes with no exterior moving parts can propel themselves forward, jump on top of each other, and snap together to form arbitrary shapes
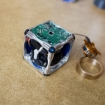 |
| A prototype of a new modular robot, with its innards exposed and its flywheel � which gives it the ability to move independently � pulled out. Photo: M. Scott Brauer |
Abstract:
In 2011, when an MIT senior named John Romanishin proposed a new design for modular robots to his robotics professor, Daniela Rus, she said, "That can't be done."
Two years later, Rus showed her colleague Hod Lipson, a robotics researcher at Cornell University, a video of prototype robots, based on Romanishin's design, in action. "That can't be done," Lipson said.
Surprisingly simple scheme for self-assembling robots: Small cubes with no exterior moving parts can propel themselves forward, jump on top of each other, and snap together to form arbitrary shapes
Cambridge, MA | Posted on October 5th, 2013In November, Romanishin � now a research scientist in MIT's Computer Science and Artificial Intelligence Laboratory (CSAIL) � Rus, and postdoc Kyle Gilpin will establish once and for all that it can be done, when they present a paper describing their new robots at the IEEE/RSJ International Conference on Intelligent Robots and Systems.
Known as M-Blocks, the robots are cubes with no external moving parts. Nonetheless, they're able to climb over and around one another, leap through the air, roll across the ground, and even move while suspended upside down from metallic surfaces.
Inside each M-Block is a flywheel that can reach speeds of 20,000 revolutions per minute; when the flywheel is braked, it imparts its angular momentum to the cube. On each edge of an M-Block, and on every face, are cleverly arranged permanent magnets that allow any two cubes to attach to each other.
"It's one of these things that the [modular-robotics] community has been trying to do for a long time," says Rus, a professor of electrical engineering and computer science and director of CSAIL. "We just needed a creative insight and somebody who was passionate enough to keep coming at it � despite being discouraged."
Embodied abstraction
As Rus explains, researchers studying reconfigurable robots have long used an abstraction called the sliding-cube model. In this model, if two cubes are face to face, one of them can slide up the side of the other and, without changing orientation, slide across its top.
The sliding-cube model simplifies the development of self-assembly algorithms, but the robots that implement them tend to be much more complex devices. Rus' group, for instance, previously developed a modular robot called the Molecule, which consisted of two cubes connected by an angled bar and had 18 separate motors. "We were quite proud of it at the time," Rus says.
According to Gilpin, existing modular-robot systems are also "statically stable," meaning that "you can pause the motion at any point, and they'll stay where they are." What enabled the MIT researchers to drastically simplify their robots' design was giving up on the principle of static stability.
"There's a point in time when the cube is essentially flying through the air," Gilpin says. "And you are depending on the magnets to bring it into alignment when it lands. That's something that's totally unique to this system."
That's also what made Rus skeptical about Romanishin's initial proposal. "I asked him build a prototype," Rus says. "Then I said, �OK, maybe I was wrong.'"
Sticking the landing
To compensate for its static instability, the researchers' robot relies on some ingenious engineering. On each edge of a cube are two cylindrical magnets, mounted like rolling pins. When two cubes approach each other, the magnets naturally rotate, so that north poles align with south, and vice versa. Any face of any cube can thus attach to any face of any other.
The cubes' edges are also beveled, so when two cubes are face to face, there's a slight gap between their magnets. When one cube begins to flip on top of another, the bevels, and thus the magnets, touch. The connection between the cubes becomes much stronger, anchoring the pivot. On each face of a cube are four more pairs of smaller magnets, arranged symmetrically, which help snap a moving cube into place when it lands on top of another.
As with any modular-robot system, the hope is that the modules can be miniaturized: the ultimate aim of most such research is hordes of swarming microbots that can self-assemble, like the "liquid steel" androids in the movie "Terminator II." And the simplicity of the cubes' design makes miniaturization promising.
But the researchers believe that a more refined version of their system could prove useful even at something like its current scale. Armies of mobile cubes could temporarily repair bridges or buildings during emergencies, or raise and reconfigure scaffolding for building projects. They could assemble into different types of furniture or heavy equipment as needed. And they could swarm into environments hostile or inaccessible to humans, diagnose problems, and reorganize themselves to provide solutions.
Strength in diversity
The researchers also imagine that among the mobile cubes could be special-purpose cubes, containing cameras, or lights, or battery packs, or other equipment, which the mobile cubes could transport. "In the vast majority of other modular systems, an individual module cannot move on its own," Gilpin says. "If you drop one of these along the way, or something goes wrong, it can rejoin the group, no problem."
"It's one of those things that you kick yourself for not thinking of," Cornell's Lipson says. "It's a low-tech solution to a problem that people have been trying to solve with extraordinarily high-tech approaches."
"What they did that was very interesting is they showed several modes of locomotion," Lipson adds. "Not just one cube flipping around, but multiple cubes working together, multiple cubes moving other cubes � a lot of other modes of motion that really open the door to many, many applications, much beyond what people usually consider when they talk about self-assembly. They rarely think about parts dragging other parts � this kind of cooperative group behavior."
In ongoing work, the MIT researchers are building an army of 100 cubes, each of which can move in any direction, and designing algorithms to guide them. "We want hundreds of cubes, scattered randomly across the floor, to be able to identify each other, coalesce, and autonomously transform into a chair, or a ladder, or a desk, on demand," Romanishin says.
Written by: Larry Hardesty, MIT News Office
####
For more information, please click here
Contacts:
Sarah McDonnell
617-253-8923
Copyright © Massachusetts Institute of Technology
If you have a comment, please Contact us.Issuers of news releases, not 7th Wave, Inc. or Nanotechnology Now, are solely responsible for the accuracy of the content.
Bookmark:









| Related News Press |
News and information
![]() Quantum computer improves AI predictions April 17th, 2026
Quantum computer improves AI predictions April 17th, 2026
![]() Flexible sensor gains sensitivity under pressure April 17th, 2026
Flexible sensor gains sensitivity under pressure April 17th, 2026
![]() A reusable chip for particulate matter sensing April 17th, 2026
A reusable chip for particulate matter sensing April 17th, 2026
![]() Detecting vibrational quantum beating in the predissociation dynamics of SF6 using time-resolved photoelectron spectroscopy April 17th, 2026
Detecting vibrational quantum beating in the predissociation dynamics of SF6 using time-resolved photoelectron spectroscopy April 17th, 2026
Videos/Movies
![]() ICFO researchers overcome long-standing bottleneck in single photon detection with twisted 2D materials August 8th, 2025
ICFO researchers overcome long-standing bottleneck in single photon detection with twisted 2D materials August 8th, 2025
![]() New X-ray imaging technique to study the transient phases of quantum materials December 29th, 2022
New X-ray imaging technique to study the transient phases of quantum materials December 29th, 2022
![]() Solvent study solves solar cell durability puzzle: Rice-led project could make perovskite cells ready for prime time September 23rd, 2022
Solvent study solves solar cell durability puzzle: Rice-led project could make perovskite cells ready for prime time September 23rd, 2022
![]() Scientists prepare for the world�s smallest race: Nanocar Race II March 18th, 2022
Scientists prepare for the world�s smallest race: Nanocar Race II March 18th, 2022
Self Assembly
![]() Diamond glitter: A play of colors with artificial DNA crystals May 17th, 2024
Diamond glitter: A play of colors with artificial DNA crystals May 17th, 2024
![]() Liquid crystal templated chiral nanomaterials October 14th, 2022
Liquid crystal templated chiral nanomaterials October 14th, 2022
![]() Nanoclusters self-organize into centimeter-scale hierarchical assemblies April 22nd, 2022
Nanoclusters self-organize into centimeter-scale hierarchical assemblies April 22nd, 2022
![]() Atom by atom: building precise smaller nanoparticles with templates March 4th, 2022
Atom by atom: building precise smaller nanoparticles with templates March 4th, 2022
Discoveries
![]() Quantum computer improves AI predictions April 17th, 2026
Quantum computer improves AI predictions April 17th, 2026
![]() Flexible sensor gains sensitivity under pressure April 17th, 2026
Flexible sensor gains sensitivity under pressure April 17th, 2026
![]() A reusable chip for particulate matter sensing April 17th, 2026
A reusable chip for particulate matter sensing April 17th, 2026
![]() Detecting vibrational quantum beating in the predissociation dynamics of SF6 using time-resolved photoelectron spectroscopy April 17th, 2026
Detecting vibrational quantum beating in the predissociation dynamics of SF6 using time-resolved photoelectron spectroscopy April 17th, 2026
Announcements
![]() A fundamentally new therapeutic approach to cystic fibrosis: Nanobody repairs cellular defect April 17th, 2026
A fundamentally new therapeutic approach to cystic fibrosis: Nanobody repairs cellular defect April 17th, 2026
![]() UC Irvine physicists discover method to reverse �quantum scrambling� : The work addresses the problem of information loss in quantum computing system April 17th, 2026
UC Irvine physicists discover method to reverse �quantum scrambling� : The work addresses the problem of information loss in quantum computing system April 17th, 2026
|
|
||
|
|
||
| The latest news from around the world, FREE | ||
|
|
||
|
|
||
| Premium Products | ||
|
|
||
|
Only the news you want to read!
Learn More |
||
|
|
||
|
Full-service, expert consulting
Learn More |
||
|
|
||